La trappe de Mercédes
Cette page est le résumé d'un projet développé sur le forum Futura Science. Un forumeur voulait recréer la commande d'ouverture et de fermeture d'une trappe de lecteur de CDRom.
L'original de cette discussion est ICI
Cahier des charges:
Le but est donc de commander cette trappe par un seul poussoir en alternant la sortie et la rentrée à chaque appui.
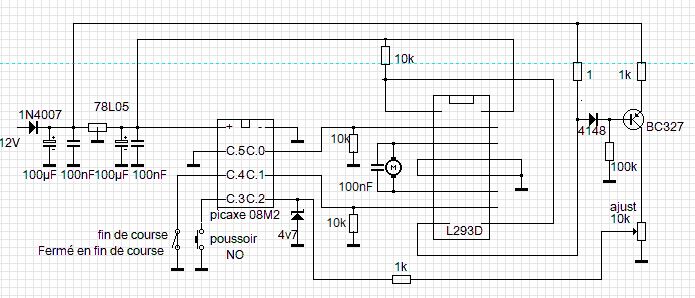
En plus, il a été installé une limitation de courant en cas de blocage de la trappe, la puissance du moteur est compatible avec un driver L293.
Le côté un peu interessant est l'utilisation d'un "miroir de courant" simplifié par le remplacement d'une jonction base/émetteur par une simple diode 1n4148. C'est moins académique, mais ça fonctionne.
Le schéma:
Le code:
;Trappe Mercedes MM 06102018
;conditions initiales: poussoir N0 ; FDC NF (=0) en fin de course
#picaxe 08M2
#no_data
symbol pous =pinC.3
symbol FDC =pinC.4
symbol ouvr =C.0
symbol ferm =C.1
symbol potar =C.2
symbol Cmax =b1
symbol Cmot =b2
symbol sens =bit0
symbol flag =bit1
pullup %11000 ;pullup sur C.3 et C.4
Cmax=100
sens=0 ;sens ouverture
Do
low ferm
low ouvr
do loop while pous=1 ;attente appui
do loop while pous=0 ;attente relachement
gosub mouv
Loop
mouv:
if sens=0 then ;sens ouverture
high ouvr ;moteur ON sens ouverture
do
gosub protect
loop while FDC=0 and flag=0 ;attente ouverture FDC
do
gosub protect
loop while FDC=1 and flag=0 ;attente fermeture FDC
low ouvr ;arret moteur
elseif sens=1 then ;sinon, sens fermeture
high ferm ;moteur ON sens fermeture
do
gosub protect
loop while FDC=0 and flag=0 ;attente ouverture FDC
do
gosub protect
loop while FDC=1 and flag=0
low ferm
endif
sens=not sens ;inversion sens pour appui suivant
flag=0
return
protect:
readadc potar,Cmot ;mesure courant moteur
if Cmot>Cmax then ;si moteur bloqué
pause 200 ;temporisation courant démarrage
readadc potar,Cmot ;mesure courant moteur
if Cmot>Cmax then ;confirmation blocage
low ouvr ;on coupe
low ferm ;tout
flag=1
endif
endif
return
Le typon et le circuit réalisé:
;Trappe Mercedes MM 06102018
;conditions initiales: poussoir N0 ; FDC NF (=0) en fin de course
#picaxe 08M2
#no_data
symbol pous =pinC.3
symbol FDC =pinC.4
symbol ouvr =C.0
symbol ferm =C.1
symbol potar =C.2
symbol Cmax =b1
symbol Cmot =b2
symbol sens =bit0
symbol flag =bit1
pullup %11000 ;pullup sur C.3 et C.4
Cmax=100
sens=0 ;sens ouverture
Do
low ferm
low ouvr
do loop while pous=1 ;attente appui
do loop while pous=0 ;attente relachement
gosub mouv
Loop
mouv:
if sens=0 then ;sens ouverture
high ouvr ;moteur ON sens ouverture
do
gosub protect
loop while FDC=0 and flag=0 ;attente ouverture FDC
do
gosub protect
loop while FDC=1 and flag=0 ;attente fermeture FDC
low ouvr ;arret moteur
elseif sens=1 then ;sinon, sens fermeture
high ferm ;moteur ON sens fermeture
do
gosub protect
loop while FDC=0 and flag=0 ;attente ouverture FDC
do
gosub protect
loop while FDC=1 and flag=0
low ferm
endif
sens=not sens ;inversion sens pour appui suivant
flag=0
return
protect:
readadc potar,Cmot ;mesure courant moteur
if Cmot>Cmax then ;si moteur bloqué
pause 200 ;temporisation courant démarrage
readadc potar,Cmot ;mesure courant moteur
if Cmot>Cmax then ;confirmation blocage
low ouvr ;on coupe
low ferm ;tout
flag=1
endif
endif
return
Le typon et le circuit réalisé:
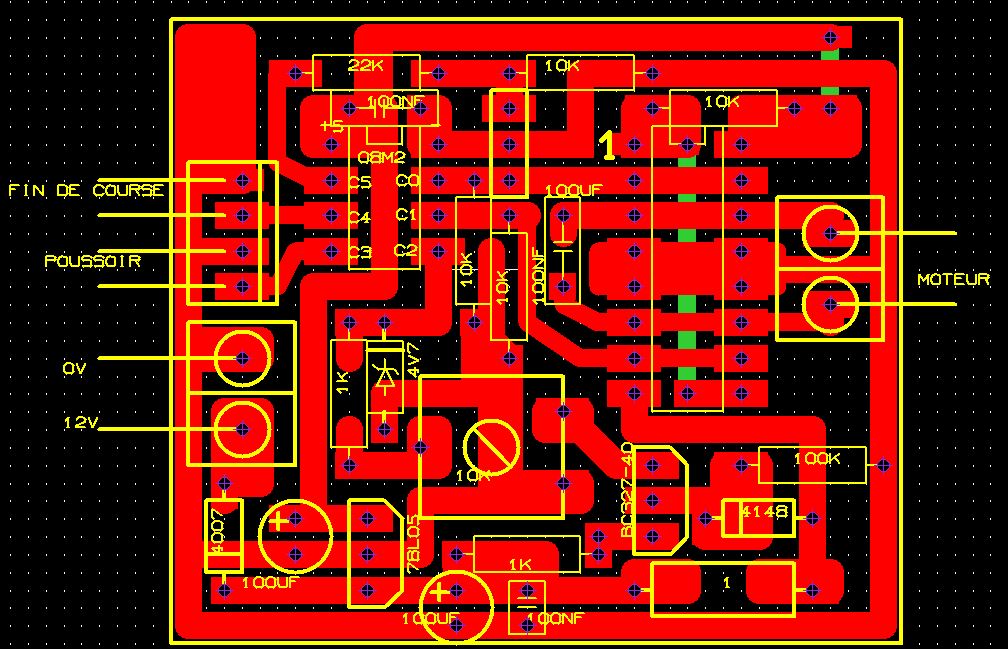 | 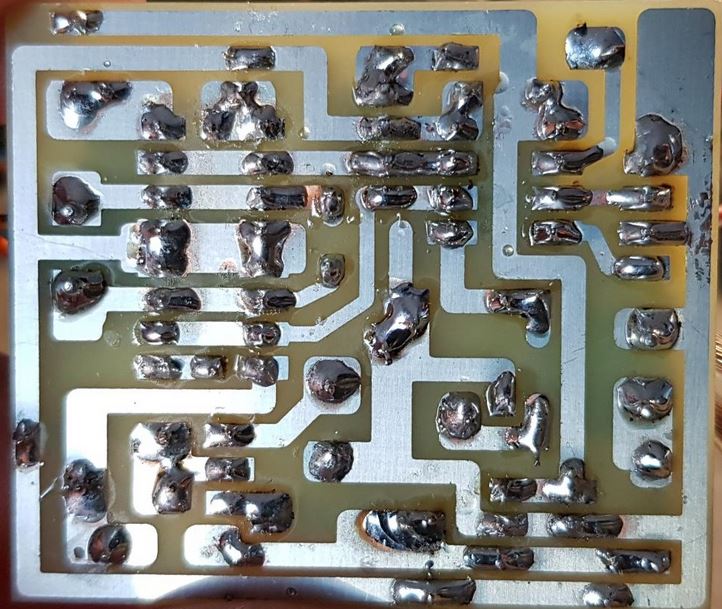 |
| le typon | le circuit |
Pour une réalisation par JLCPCB, voici les gerbers à télécharger tel quel sur le site JLCPCM