Le GPS de Mazda Rx8
Sur Futura Sciences, le forumeur Ghashog Delta cherchait une solution pour commander son GPS escamotable.
L'intégratité de cette discussion assez longue est ICI
Le cahier des charges est le suivant:
Il y a deux poussoirs de commande, un pour ouvrir et fermer le volet, un second pour régler le tilt (inclinaison) du volet.
Le système doit garder en mémoire la dernière position du volet, s'ouvrir à cette position à la mise du contact et se fermer automatiquement à la fermeture du contact.
La position du volet est mesurée par un potentiomètre.
On ajoute un arret du fonctionnement en cas de blocage du volet.
Le shéma proposé se compose essentiellement d'un picaxe 14M2 et d'un driver L293 pour le moteur:
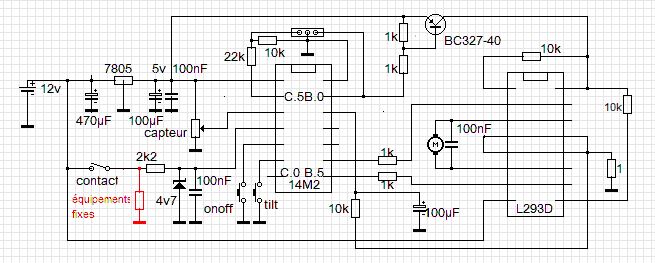
Les quatre amplis du L293D sont en parallèle deux à deux
La broche B.0 est utilisée pour la programmation et le reset du L293D
Il devrait y avoir une résistance de pulldown sur l'entrée C.3 (alimentation contact). Mais si le contact est ouvert, tous les équipements non alimentés relient cette entrée au 0v, sans risque de tension aléatoire.
La broche B.0 est utilisée pour la programmation et le reset du L293D
Il devrait y avoir une résistance de pulldown sur l'entrée C.3 (alimentation contact). Mais si le contact est ouvert, tous les équipements non alimentés relient cette entrée au 0v, sans risque de tension aléatoire.
Le second schéma proposé est dans le lien de la discussion originale.
Le code correspondant à ce schéma:
;mazda MM 14/12/2017
#picaxe 14M2
symbol tilt=pinC.0 ;poussoir tilt
symbol onoff=pinC.1 ;poussoir on/off
symbol contact=pinC.3 ;entrée contact
symbol protect=B.1 ;entrée courant lu
symbol potar=C.4 ;entrée ADC capteur
symbol leve=B.2 ;sortie moteur lever
symbol baisse=B.5 ;sortie moteur baisser
symbol flag=bit0 ;flag enregistrement on/off
symbol pos=b1 ;position sélectionnée,0=entré , 1=pos1, 2=pos2, 3=pos3
symbol memopos=b2 ;mémo position pour onoff
symbol autopos=b3 ;position actuelle
symbol courmax=b4 ;seuil courant max
symbol courant=b5 ;valeur lue
symbol posact=w13 ;valeur actuelle capteur
symbol posoff=w12 ;valeur capteur rentré
symbol pos1=w11
symbol pos2=w10
symbol pos3=w9
symbol posfin=w8 ;valeur recherchée
posoff=20 ;pos rentré valeur ADC pour essais
pos1=400 ;pos1 (valeurs réelles)
pos2=500 ;pos2 (à recalculer)
pos3=600 ;pos3
courmax= 50 ;(1v -> 255/5)
memopos=1
autopos=0
dirsB=%11111101 ;portsB en sorties sauf B.1
low leve :low baisse ;confirmation arrêt moteur
do ;en sommeil env 140µA
sleep 2 ;réveil toutes le env 4,5 s
loop while contact=0 ;tant que contact off
setfreq M16 ;fréquence à 16MHz
pullup %11100000000 ;pullup sur C.0 à C.2
read 0,pos ;lecture position mémorisée
if pos <>0 then gosub mouv ;si pos non rentrée, on bouge
setint or %00, %11 ;interruption sur onpff et tilt (C.0 ou C.1)
;****** boucle principale ************
do
if pos<>autopos then gosub mouv ;suite interupt, si nouvelle pos différente, on bouge
if flag=1 then gosub M_A ;demande OFF par interrupt
if contact=0 then gosub repos ;détection coupure contact
loop
; ********************************************
M_A: ;sub poussoir onoff
if pos=0 then ;il est rentré,on le sort
pos=memopos
else ;il est sorti
memopos=pos
pos=0 ;on le rentre
endif
gosub mouv: ;activation moteur
flag=0 ;raz flag
return
repos: ;arret sur coupure contact
pause 5000 ;délai 1,25 s
if contact=1 then ;confirmation (test inutile?)
return ;non confirmé
endif
write 0,pos ;mémo position
pos=0 ;position rentré
readadc10 potar,posact ;si non rentré
if posact > posoff then gosub mouv ;on le rentre
reset ;réinitialisation -> sleep
mouv: ;sub mouvement
lookup pos,(posoff,pos1,pos2,pos3),posfin ;valeur capteur ft position
if posact>posfin then ; on est au dessus,
high baisse ;on baisse
do
readadc protect, courant
if courant>courmax then blocage
readadc10 potar,posact ;valeurs de 0 à 1023
loop while posact > posfin ;jusqu'à position finale
low baisse ;arrêt moteur
goto fin ;on sort
elseif posact < posfin then ;on est en dessous, on lève
high leve
do
readadc protect, courant
if courant>courmax then blocage
readadc10 potar,posact
loop while posact < posfin
low leve
else ;autres cas,
low leve : low baisse ; tout arrêt (on sait jamais...)
endif
fin:
autopos=pos ;mémorisation nouvelle position
return
blocage:
low baisse: low leve
pos=0
write 0,pos
reset
interrupt: ;sub interruption sur C.O ou C.1
if tilt=0 and pos<>0 then ;action sur tilt
inc pos ;incrémentation position
if pos>=4 then ;boucle sur 3 positions
pos=1
endif
endif
if onoff=0 then ;action sur onoff
flag=1 ;marque passage
endif
do loop while tilt=0 or onoff=0 ;attente fin de condition interruption
setint or %00, %11 ;réarmement interruption
return
Le résultat.... avec les commentaires de Ghashog Delta (merci à lui)
Le code correspondant à ce schéma:
;mazda MM 14/12/2017
#picaxe 14M2
symbol tilt=pinC.0 ;poussoir tilt
symbol onoff=pinC.1 ;poussoir on/off
symbol contact=pinC.3 ;entrée contact
symbol protect=B.1 ;entrée courant lu
symbol potar=C.4 ;entrée ADC capteur
symbol leve=B.2 ;sortie moteur lever
symbol baisse=B.5 ;sortie moteur baisser
symbol flag=bit0 ;flag enregistrement on/off
symbol pos=b1 ;position sélectionnée,0=entré , 1=pos1, 2=pos2, 3=pos3
symbol memopos=b2 ;mémo position pour onoff
symbol autopos=b3 ;position actuelle
symbol courmax=b4 ;seuil courant max
symbol courant=b5 ;valeur lue
symbol posact=w13 ;valeur actuelle capteur
symbol posoff=w12 ;valeur capteur rentré
symbol pos1=w11
symbol pos2=w10
symbol pos3=w9
symbol posfin=w8 ;valeur recherchée
posoff=20 ;pos rentré valeur ADC pour essais
pos1=400 ;pos1 (valeurs réelles)
pos2=500 ;pos2 (à recalculer)
pos3=600 ;pos3
courmax= 50 ;(1v -> 255/5)
memopos=1
autopos=0
dirsB=%11111101 ;portsB en sorties sauf B.1
low leve :low baisse ;confirmation arrêt moteur
do ;en sommeil env 140µA
sleep 2 ;réveil toutes le env 4,5 s
loop while contact=0 ;tant que contact off
setfreq M16 ;fréquence à 16MHz
pullup %11100000000 ;pullup sur C.0 à C.2
read 0,pos ;lecture position mémorisée
if pos <>0 then gosub mouv ;si pos non rentrée, on bouge
setint or %00, %11 ;interruption sur onpff et tilt (C.0 ou C.1)
;****** boucle principale ************
do
if pos<>autopos then gosub mouv ;suite interupt, si nouvelle pos différente, on bouge
if flag=1 then gosub M_A ;demande OFF par interrupt
if contact=0 then gosub repos ;détection coupure contact
loop
; ********************************************
M_A: ;sub poussoir onoff
if pos=0 then ;il est rentré,on le sort
pos=memopos
else ;il est sorti
memopos=pos
pos=0 ;on le rentre
endif
gosub mouv: ;activation moteur
flag=0 ;raz flag
return
repos: ;arret sur coupure contact
pause 5000 ;délai 1,25 s
if contact=1 then ;confirmation (test inutile?)
return ;non confirmé
endif
write 0,pos ;mémo position
pos=0 ;position rentré
readadc10 potar,posact ;si non rentré
if posact > posoff then gosub mouv ;on le rentre
reset ;réinitialisation -> sleep
mouv: ;sub mouvement
lookup pos,(posoff,pos1,pos2,pos3),posfin ;valeur capteur ft position
if posact>posfin then ; on est au dessus,
high baisse ;on baisse
do
readadc protect, courant
if courant>courmax then blocage
readadc10 potar,posact ;valeurs de 0 à 1023
loop while posact > posfin ;jusqu'à position finale
low baisse ;arrêt moteur
goto fin ;on sort
elseif posact < posfin then ;on est en dessous, on lève
high leve
do
readadc protect, courant
if courant>courmax then blocage
readadc10 potar,posact
loop while posact < posfin
low leve
else ;autres cas,
low leve : low baisse ; tout arrêt (on sait jamais...)
endif
fin:
autopos=pos ;mémorisation nouvelle position
return
blocage:
low baisse: low leve
pos=0
write 0,pos
reset
interrupt: ;sub interruption sur C.O ou C.1
if tilt=0 and pos<>0 then ;action sur tilt
inc pos ;incrémentation position
if pos>=4 then ;boucle sur 3 positions
pos=1
endif
endif
if onoff=0 then ;action sur onoff
flag=1 ;marque passage
endif
do loop while tilt=0 or onoff=0 ;attente fin de condition interruption
setint or %00, %11 ;réarmement interruption
return
Le résultat.... avec les commentaires de Ghashog Delta (merci à lui)