Pilotage des moteurs pas à pas
Le test porte sur un petit moteur bipolaire 5 V démonté d'un scanner, on trouve ces moteurs un peu partout, imprimantes, scanners, disques durs,etc... et ils finissent généralement à la poubelle, dommage.
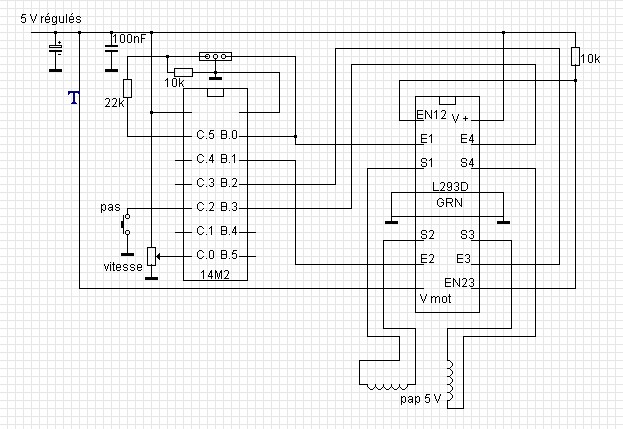
Le µC est un picaxe 14M2, 4 sorties pilotent un driver L293D, relié aux deux bobines du moteur
Un potentiomètre pour faire varier la vitesse, avec changement de sens au centre. Un poussoir pour passer de pas entiers à demis pas, et inversement.
Cet essai est minimaliste, pour des moteurs plus puissants, il faut aussi gérer le courant moteur. Un classique est le couple L297 + L298 dont on trouve des descriptions sur la toile.
Pour le petit moteur de scanner, le L293D est suffisant.
Le schéma:
Le µC est un picaxe 14M2, 4 sorties pilotent un driver L293D, relié aux deux bobines du moteur
Un potentiomètre pour faire varier la vitesse, avec changement de sens au centre. Un poussoir pour passer de pas entiers à demis pas, et inversement.
Cet essai est minimaliste, pour des moteurs plus puissants, il faut aussi gérer le courant moteur. Un classique est le couple L297 + L298 dont on trouve des descriptions sur la toile.
Pour le petit moteur de scanner, le L293D est suffisant.
Le schéma:
Le code (faire un copier/coller dans l'éditeur PE6):
'===================================================
'Commande moteur PAP bipolaire
'14M2 plus Driver L293D
' connections moteur : sur A et B du L293D
;MM : 27 03 2015 / 30/03/2015
'===================================================
#picaxe 14M2
'===================================================
setfreq m32
symbol potar= C.0
symbol moteur = outpinsB 'variable systeme outpinsB nommée moteur
symbol pous=pinC.2 ;commande interruption sur C.2
symbol cpt= b1 ;compteur tournant
symbol vitesse= b2
symbol pas=b3
dirsB= %001111 'affectation B.0 a B.3 en sortie vers le L293
pullup %10000000000 ;pullup sur C.2
setint %00000000,%00000100 ;interruption sur C.2
pas=2 ;départ en pas entiers
do
readadc potar, vitesse
select vitesse
case >132
cpt=cpt+pas
cpt = cpt & %00000111 'la valeur de b1 est limitée à 3 bits, soit 0 à 7
'mémorisation de la sequence de commande pour le moteur en demi pas
lookup cpt,(%1010,%1000,%1001,%0001,%0101,%0100,%0110,%0010),moteur
vitesse= 255-vitesse
pause vitesse 'pause en ms/8
case < 123
cpt=cpt-pas
cpt = cpt & %00000111 'la valeur de b1 est limitée à 3 bits, soit 0 à 7 ;
lookup cpt,(%1010,%1000,%1001,%0001,%0101,%0100,%0110,%0010),moteur
pause vitesse 'pause en ms/8
else
moteur=0
endselect
loop
interrupt:
pas=pas//2 ; 0 si pas =2, 1 si pas =1
pas=pas+1 ;changement en 1 ou 2, on peut ecrire pas=pas//2+1
setint %00000000,%00000100 ;interruption sur C.2
do loop while pous=0
pause 4000 ;1s à fréquence M32
return
Quelques explications complémentaires:
La première partie du code, jusqu'à la boucle Do Loop est une initialisation: désignations des noms de variables, du picaxe utilisé, de la fréquence horloge, activation de pullup et d'une interruption sur la broche C.2
Par la commande : Moteur=outpinsB :
'Commande moteur PAP bipolaire
'14M2 plus Driver L293D
' connections moteur : sur A et B du L293D
;MM : 27 03 2015 / 30/03/2015
'===================================================
#picaxe 14M2
'===================================================
setfreq m32
symbol potar= C.0
symbol moteur = outpinsB 'variable systeme outpinsB nommée moteur
symbol pous=pinC.2 ;commande interruption sur C.2
symbol cpt= b1 ;compteur tournant
symbol vitesse= b2
symbol pas=b3
dirsB= %001111 'affectation B.0 a B.3 en sortie vers le L293
pullup %10000000000 ;pullup sur C.2
setint %00000000,%00000100 ;interruption sur C.2
pas=2 ;départ en pas entiers
do
readadc potar, vitesse
select vitesse
case >132
cpt=cpt+pas
cpt = cpt & %00000111 'la valeur de b1 est limitée à 3 bits, soit 0 à 7
'mémorisation de la sequence de commande pour le moteur en demi pas
lookup cpt,(%1010,%1000,%1001,%0001,%0101,%0100,%0110,%0010),moteur
vitesse= 255-vitesse
pause vitesse 'pause en ms/8
case < 123
cpt=cpt-pas
cpt = cpt & %00000111 'la valeur de b1 est limitée à 3 bits, soit 0 à 7 ;
lookup cpt,(%1010,%1000,%1001,%0001,%0101,%0100,%0110,%0010),moteur
pause vitesse 'pause en ms/8
else
moteur=0
endselect
loop
interrupt:
pas=pas//2 ; 0 si pas =2, 1 si pas =1
pas=pas+1 ;changement en 1 ou 2, on peut ecrire pas=pas//2+1
setint %00000000,%00000100 ;interruption sur C.2
do loop while pous=0
pause 4000 ;1s à fréquence M32
return
Quelques explications complémentaires:
La première partie du code, jusqu'à la boucle Do Loop est une initialisation: désignations des noms de variables, du picaxe utilisé, de la fréquence horloge, activation de pullup et d'une interruption sur la broche C.2
Par la commande : Moteur=outpinsB :
outpinsB désigne les broches B.0 à B.5 du picaxe.
Moteur est un octet
Les broches B.5:...:B.0 vont prendre les valeurs de bit5:...bit0 de l'octet Moteur.
Moteur est un octet
Les broches B.5:...:B.0 vont prendre les valeurs de bit5:...bit0 de l'octet Moteur.
La boucle principale Do Loop
Commence par la lecture du potentiomètre de vitesse, qui introduit une pause entre les impulsions transmises au moteur. La lecture donne une valeur de 0 à 255
Cette valeur de vitesse est divisée en trois par le "select case"
Cette valeur de vitesse est divisée en trois par le "select case"
- Case else ,entre 123 et 133, le moteur ne reçoit aucune impulsion et le courant dans les bobines est nul. C'est un choix, le moteur ne chauffe pas mais le couple est nul.
- case > 133, la valeur calculée "vitesse" donne une valeur de 0 à 122 (erreur: 121)
Le pas alterne entre 1 et 2 à chaque passage dans l'interruption, déclenchée par le poussoir.
La séquence des polarisations des bobines est mémorisié dans un "lookup".
Les 8 combinaisons correspondent à une commande en demi pas, en ne prenant qu'une combinaison sur deux, on passe en pas entier. Le compteur est incrémenté de 1 ou de 2, au choix.
Le compteur est un octet dont on ne garde que les trois derniers bits, il tourne sur 8 valeurs entre 0 et 7 (équivalent à un modulo 8).
A chaque passage, la commande "lookup" scanne les valeurs mémorisée et sélectionne la combinaison correspondante à la valeur du compteur cpt pour alimenter les bobines par la variable Moteur.
- case < 123, fonctionnement identique, mais le compteur est décrémenté, les combinaisons sont lues à l'envers, et le moteur tourne dans l'autre sens.
La séquence des polarisations des bobines est mémorisié dans un "lookup".
Les 8 combinaisons correspondent à une commande en demi pas, en ne prenant qu'une combinaison sur deux, on passe en pas entier. Le compteur est incrémenté de 1 ou de 2, au choix.
Le compteur est un octet dont on ne garde que les trois derniers bits, il tourne sur 8 valeurs entre 0 et 7 (équivalent à un modulo 8).
A chaque passage, la commande "lookup" scanne les valeurs mémorisée et sélectionne la combinaison correspondante à la valeur du compteur cpt pour alimenter les bobines par la variable Moteur.
- case < 123, fonctionnement identique, mais le compteur est décrémenté, les combinaisons sont lues à l'envers, et le moteur tourne dans l'autre sens.
Vidéo de demo du code ci-dessus: