Portail coulissant automatique et picaxe
Ce projet est issu d'une discussion assez longue, sur un forum d'électronique que vous pouvez suivre ici.
Le cahier des charges:
- Automatisation d'un portail modèle réduit par micro processeur Picaxe.
- Commande par poussoir donnant la séquence: Ouverture/Arrêt/Fermeture/Arrêt/Ouverture.
- Fermeture automatique après temporisation.
- Réouverture automatique en cas de détection d'obstacle par cellule infra rouge.
- Réouverture automatique en cas de freinage moteur avec sensibilité réglable.
- Signalisation lumineuse du mouvement par voyant clignotant.
- Le fonctionnement manuel est prioritaire sur le fonctionnement automatique.
Le schéma:
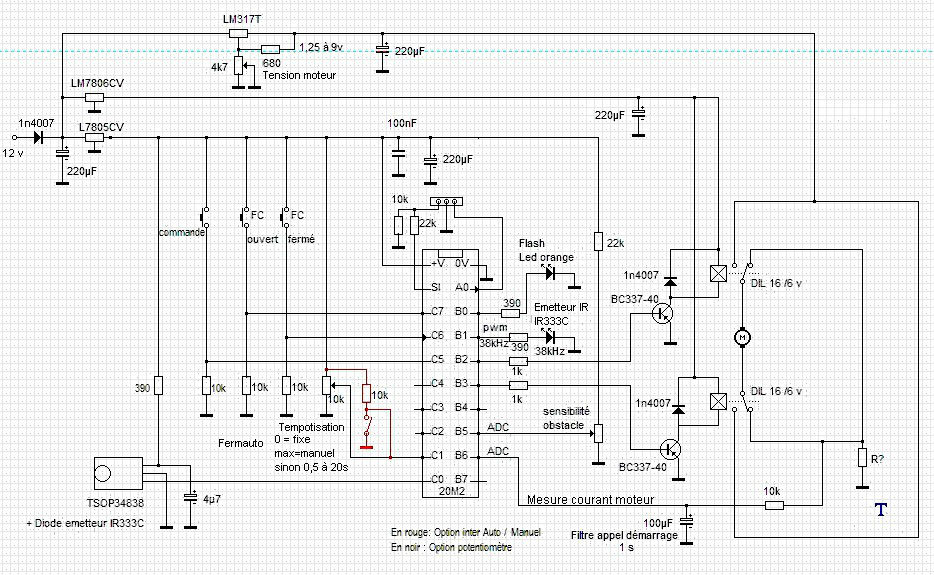
Commentaires:
Le microprocesseur est un 20M2, il se programme sur site avec un PC et un câble série ou un cordon adaptateur USB.
Le moteur est commandé par deux relais miniatures DIL16 6 volts.
Deux "fin de course" NO, un contact momentané suffit à arrêter le moteur.
La commande par poussoir génère une interruption et un changement l'état à tout moment. La commande manuelle est prioritaire sur l'automatisme. Elle modifie l'état suivant une séquence prédéfinie:
Ouverture / Arret / fermeture / Arret / Ouverture
Sans intervention manuelle, la fermeture est automatique.
La barrière IR est composée d'une diode émettrice IR333C et d'un capteur TSOP34838, accordé sur 38kHz.
La résistance R, dans le retour à la masse du moteur mesure le courant, elle doit être ajustée pour relever une tension d'au moins 100 mV en fonctionnement normal. Le seuil de sensibilité dépend du moteur utilisé, il est réglé par un potentiomètre.
Si aucun obstacle n'est détecté par la barrière, le portail se referme automatiquement après une temporisation.
Deux options de temporisation: (le programme accepte les deux options)
Sans intervention manuelle, la fermeture est automatique.
La barrière IR est composée d'une diode émettrice IR333C et d'un capteur TSOP34838, accordé sur 38kHz.
La résistance R, dans le retour à la masse du moteur mesure le courant, elle doit être ajustée pour relever une tension d'au moins 100 mV en fonctionnement normal. Le seuil de sensibilité dépend du moteur utilisé, il est réglé par un potentiomètre.
Si aucun obstacle n'est détecté par la barrière, le portail se referme automatiquement après une temporisation.
Deux options de temporisation: (le programme accepte les deux options)
- inter + 10k (en rouge sur le schéma). Inter fermé, la temporisation est fixée par le programme. Inter ouvert, pas de fermeture automatique.
- potentiomètre (en noir).
Curseur à la masse (0 volt), idem inter fermé, temporisation fixe.
Curseur à 5 volt, idem inter ouvert, pas de temporisation.
Entre les deux, temporisation réglable de 0,5 à 20 secondes.
Curseur à 5 volt, idem inter ouvert, pas de temporisation.
Entre les deux, temporisation réglable de 0,5 à 20 secondes.
Trois alimentations régulées à partir d'une source 12 volts continus:
5 volts pour le picaxe
6 volts pour les relais
Alimentation tension variable pour le moteur.
6 volts pour les relais
Alimentation tension variable pour le moteur.
Le programme:
' Gestion de portail (Mag1 21 02 2013)
' Gestion manuelle par poussoir commande séq : ouverture/arrêt/fermeture/arrêt/
' Fermeture automatique temporisée
' Réouverture auto en cas d'obstacle par barrière IR
' Réouverture auto en cas de surcharge moteur (seuil réglable)
' Il y a deux programmes en temps partagé
' La commande est gérée par interruption
#picaxe 20M2 'directive spécification picaxe 20M2
start0: 'Premier programme en temps partagé
'****** Nomination des ports entrées **********************
symbol cmd = pinC.5 'commande sur pin interruption
symbol fcf = pinC.6 'fin de course fermeture
symbol fco = pinC.7 'fin de course ouverture
symbol sensib = B.5 'pot lecture seuil sensibilité
symbol courmot = B.6 'lecture courant moteur
symbol alert = pinC.0 'lecture état barrière IR
symbol lecpot = C.1 'ADC ou Fixe 1 = fermeture auto ; 0 = manuelle
'******* Nomination des ports sorties *******************
symbol LedR = B.0 'sortie flash '
symbol EmetIR = B.1 'sortie Led IR
symbol ouv = B.2 'commande moteur ouverture
symbol ferm = B.3 'commande moteur fermeture
'******* Nomination des variables ***************
'******** Variables type bit (1 bit ) ************
symbol mouv = bit0 'bit état "en mouvement" pour le flash
symbol souvre = bit1 'mémo état précédent (1=ouverture; 0=fermeture)
symbol obst = bit2 'mémo détection obstacle
symbol fermauto = bit3 'mémo fermauto ou manuel
'******** Variables type byte (1 octet) **************
symbol etat = b1 'état en cours 1=ouverture; 2=fermeture; 3= arret
symbol seuil = b2 'valeur seuil sensib
symbol courant = b3 'mesure du courant
'********* Variables type word (2 octets) ****************
symbol tempo = w13 'lecture temporisation
'**********************************************************
'do:loop while cmd=0 'attente pour réglage ADC sur simulateur
'******** Initialisation variables ********
low ouv: low ferm: low ledR
etat =3 'etat arret à la mise sous tension
souvre=0 'memo en fermeture : la 1ère commande sera ouverture
pwmout EmetIR, 104, 211 'activation Emetteur IR PWM 38 kHz à 16MHz
'******** Interruption sur C.5 niveau haut *********
setint %00100000 ,%00100000
'******** Boucle principale ********
Do
' ************* Réglage temporisation
readadc10 lecpot,tempo 'lecture pot. tempo. Donne un nombre de 0 à 1023
if tempo > 1000 then 'pot max, on passe en manuel ou pas de pot C.1 à 5 v
fermauto=0 'fermauto =0 càd en manuel
elseif tempo <20 then 'automatic sans pot C.1 est à 0
fermauto=1 'fermauto =1 càd automatique
tempo=4000 'tempo fixe 4 s
else 'pot position médiane
fermauto=1 'donc automatique, avec
tempo= 20*tempo 'réglage tempo 0,4s à 20s
endif
' ********** Réglage sensibilité obstacle
readadc sensib, seuil 'lecture du seuil moteur
' **********
select etat 'aiguillage suivant variable "etat= 1, 2, 3, 4"
case 1 ' etat =1 = ouverture
mouv=1 'pour le flash
souvre=1 'mémo état
obst=0 'reset mémo obstacle IR
do 'boucle ouverture
low ferm : high ouv 'positionnement des relais ouverture
loop while fco=0 and etat=1 'tant que fco ouvert et pas de changementd'état
if etat<>3 then 'si arret par commande, on y reste
etat=4 'sinon on passe en etat =4 : fermeture auto temporisé
endif
case 2 ' état = 2 = fermeture
mouv=1 'pour le flash
souvre=0 'mémo état
do 'boucle fermeture
readadc courmot, courant 'lecture courant moteur
if courant > seuil then 'si dépassemnt seuil
obst=1 'mémo détect obstacle
etat=1 'positionnement état ouverture
endif
if alert=1 then 'détection alert IR
etat=1 'position état ouverture
endif
low ouv: high ferm 'on ferme!
loop while fcf=0 and etat=2 'tant que fcf ouvert et pas de changement d'état
if alert=0 and obst =0 then 'pas de problèmes ?
etat =3 'alors,positionnement état arret
endif
case 3 ' état =3 = arret ;flash OFF
low ouv : low ferm 'arret moteur
mouv=0 'arret du flash
case 4 'état = 4 = fermeture automatique ; flash ON
low ouv : low ferm 'arret moteur
do 'boucle temporisation mini 1 fois
pause tempo 'attente
loop while alert=1 and etat=4 ' si obstable IR et pas changement état, on boucle
if fermauto =1 and etat=4 then 'si automatique =1 et etat 4
etat=2 'fermeture auto
else 'sinon
etat=3 'arret
endif 'fin de if
end select 'fin de select
loop 'fin de boncle principale
interrupt: 'Ah, on a appuyé sur le bouton !!
do : loop while cmd=1 'attente relachement poussoir
select etat
case 1,2,4 'on est en état 1,2 ou 4
etat = 3 'alors passage à l'état 3 (arret)
case 3 'on est à l'arret
if souvre=1 then ' état précédent= ouverure
etat=2 ' alors on passe en fermeture
else
etat=1 ' sinon, c'est le contraire
endif
end select
setint %00100000 ,%00100000 'reset de l'interruption
return
' ***************************************************************************
start1: 'Second programme en temps partagé uniquement pour le flash
Do
if mouv=1 then 'si mouvement
high ledR 'ça
pause 500 'cli
low ledR 'gno
pause 500 'te !
endif
loop
La réalisation.
Le circuit proposé tient sur une plaquette véroboard de 5 x 10 cm.
A ce propos, le logiciel gratuit TCI 4 pour la réalisation de circuits imprimés peut aider à la réalisation de circuit sur véroboard et la réalisation du circuit est décrite dans la page "circuit veroboad avec TCI4".
Et la réalisation du demandeur, avec en prime une démonstration du réglage de la sensibilité moteur:
https://youtu.be/z59F_Fil49s
Le circuit proposé tient sur une plaquette véroboard de 5 x 10 cm.
A ce propos, le logiciel gratuit TCI 4 pour la réalisation de circuits imprimés peut aider à la réalisation de circuit sur véroboard et la réalisation du circuit est décrite dans la page "circuit veroboad avec TCI4".
Et la réalisation du demandeur, avec en prime une démonstration du réglage de la sensibilité moteur:
https://youtu.be/z59F_Fil49s