Stop and Go
pour piste mini z
Le projet "Stop and Go" est la réponse proposée à une question de laurentby sur un forum d'électronique, voir ICIEn résumé, il s'agit d'installer une barrière de pénalité sur une piste de voitures télécommandées mini z.
Le cahier des charges :
Le Sart and Go est une sorte de sas constitué d'un portique avec cinq leds rouges, d'une barrière "Arrivée" et d'une barrière "Départ".
A la mise sous tension, le programme entre dans une boucle d'attente. Pendant ce temps, plusieurs actions sont possibles:
- le temps d'alarme est réglable par un potentiomètre, de 0 à 10 s
- l'appui sur le poussoir permet de tester les barrières, si le tsop récepteur fonctionne et est éclairé par la led émettrice, la led correspondante du portique est éteinte. Si une barrière ne fonctionne pas, cette led est allumée (voir démo sur la vidéo maquette).
En relâchant le poussoir, on lit en binaire sur les leds le temps de pénalité enregistré en mémoire. Ex: 1010 =8+2=10s.
Lorsque toutes les leds sont éteintes, la voiture peut franchir la barrière "départ" sans provoquer d'alarme. Dans le cas contraire, l'allumage des leds est figé et une alarme visuelle et sonore se déclenche (temps réglable de 0 à 10 s), ce temps peut être abrégé en appuyant sur le poussoir.
Après l'alarme et le dégagement de la barrière "départ", le système est automatiquement recyclé.
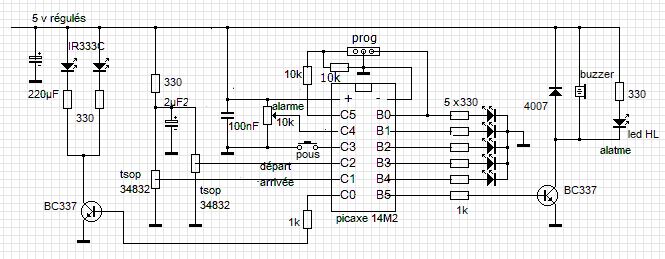
Le schéma:
La maquette:
La très belle réalisation de laurentby:
Le code:
Un programme en basic se lit assez facilement, avec quelques mots d'anglais simples. Ce qui suit le caractère ";" est un commentaire.
A la mise sous tension, le système entre dans une boucle d'attente. Un appui sur le poussoir pendant cette boucle envoie dans un sous programme de test barrière et réglage du temps de pénalité (regtempo). Sans appui pendant 3s, le programme retourne dans la boucle d'attente.
Le franchissement complet de la barrière "arrivée" déclenche le comptage du temps de pénalité. Le franchissement de la barrière "départ" envoie le programme dans le sous programme d'interruption (interrupt), on teste la variable temps (time), si cette valeur est inférieure au temp de pénalité, une alarme est déclenchée.
;StopAndGo MM 20/03/2022
#picaxe 14M2 ;pour vérif syntaxe en ft spéfifications du 14M2
setfreq M16 ;Fréquence horloge à 16 MHz; réglage 38kHz plus précis
symbol LedIR = C.0 ;sortie leds IR
symbol recepA = pinC.1 ;valeur logique entrée TSOP arrivée
symbol recepD = pinC.2 ;idem TSOP départ
symbol pous=pinC.3 ;valeur entrée poussoir sur C.3
symbol alarm=B.5 ;sortie alarme
symbol potar=C.4 ;réglage temps alarme
symbol tempo=b1 ;temps pénalité
symbol rest=b2 ;temps restant
symbol Talarm=b3 ;valeur temps alarme
symbol test=b4 ;pour visu test barrières
dirsB=%11111 ;désignation broches B0 à B4 en sorties, pour fonctionnement de pinsB
read 0,tempo ;lecture de la tempo mémorisée en EEPROM
;***** option 10s par défaut *******
If tempo=0 then ;Si la lecture EEPROM donne 0 (Ex. après programmation)
tempo=10 ;tempo pénalité à 10s par défaut
endif ;Pour enregistrer une mémo à 0 => 3 lignes à supprimer
;*******************************
pwmout LedIR, 104,209 ;activation Emetteur IR PWM 38 kHz à 16 MHz; RC=50%
pullup %100000000000 ;pullup sur C.3, R interne au +5V
do ;boucle principale
low alarm ;sortie alarm niveau bas
do ;boucle attente barrière arivée
if pous=0 then ;poussoir appuyé
gosub regtempo ;sous prog réglages
endif
pinsB=0 ;toutes sorties B à 0
readadc potar,Talarm ;lecture tempo alarme
Talarm= 10 * Talarm/240 ; calibrage de 0 à 10 s
loop while recepA=0 ;boucle tant que tsop éclairé
pinsB=%11111 ;allumage les 5 leds
do loop while recepA=1 ;attente passage après barrière
setint %100,%100 ;interruption sur C.2 (barr départ) niveau haut
time=0 ;RAZ compteur de secondes (timer 1s)
do ;boucle selectcase
rest=tempo-time ;écart temporisation et temps attente
select case rest ;selection en ft valeur de rest
case 4
pinsB=%1111 ;4 leds allumées
case=3
pinsB=%111
case=2
pinsB=%11
case=1
pinsB=%1
case=0
pinsB=%0 ;tout éteint
exit ;case=0 => sortie de boucle
end select
loop
loop ;fin boucle principale
;*************************************
interrupt: ;interruption si barrière départ franchie
if time<tempo then ;Oh lala, il a grillé le feu!!!
time=0
do ;boucle alarme
high alarm ;alarme ON
pause 1000 ;=250ms à 16MHz
low alarm ;alarme off
pause 1000
loop while time<Talarm or pous=0 ;temps alarme
low alarm
do loop while pous=0 ;attente arret poussoir
endif
do loop while recepD=1 ;attente sortie barrière départ
reset ;RAZ du programme (soluce facile RAZ piles sub/return)
;******************************************
regtempo: ;réglage temporisations tempo et temps larme
do
test=recepD*2+recepA ;test des barrières: led allumée=défaut
pinsB=test ;visu test sur portique
loop while pous=0 ;attente relachement
pinsB=tempo ;visu tempo pénalité sur portique en binaite: %1010 = 8+2=10
do
time=0
do
if time>2 then ;sortie auto après 3 secondes sans appui
write 0,tempo ;mémo temps pénatité en EEPROOM
return ;retour boucle principale
endif
loop while pous=1 ;fin boucle attente sans appui
do loop while pous=0 ;boucle attente relachement
inc tempo ;comptage appuis poussoir
if tempo>15 then ;bouclage sur 15s
tempo=0
endif
pinsB=tempo ;visualisation tempo sur leds
loop
#picaxe 14M2 ;pour vérif syntaxe en ft spéfifications du 14M2
setfreq M16 ;Fréquence horloge à 16 MHz; réglage 38kHz plus précis
symbol LedIR = C.0 ;sortie leds IR
symbol recepA = pinC.1 ;valeur logique entrée TSOP arrivée
symbol recepD = pinC.2 ;idem TSOP départ
symbol pous=pinC.3 ;valeur entrée poussoir sur C.3
symbol alarm=B.5 ;sortie alarme
symbol potar=C.4 ;réglage temps alarme
symbol tempo=b1 ;temps pénalité
symbol rest=b2 ;temps restant
symbol Talarm=b3 ;valeur temps alarme
symbol test=b4 ;pour visu test barrières
dirsB=%11111 ;désignation broches B0 à B4 en sorties, pour fonctionnement de pinsB
read 0,tempo ;lecture de la tempo mémorisée en EEPROM
;***** option 10s par défaut *******
If tempo=0 then ;Si la lecture EEPROM donne 0 (Ex. après programmation)
tempo=10 ;tempo pénalité à 10s par défaut
endif ;Pour enregistrer une mémo à 0 => 3 lignes à supprimer
;*******************************
pwmout LedIR, 104,209 ;activation Emetteur IR PWM 38 kHz à 16 MHz; RC=50%
pullup %100000000000 ;pullup sur C.3, R interne au +5V
do ;boucle principale
low alarm ;sortie alarm niveau bas
do ;boucle attente barrière arivée
if pous=0 then ;poussoir appuyé
gosub regtempo ;sous prog réglages
endif
pinsB=0 ;toutes sorties B à 0
readadc potar,Talarm ;lecture tempo alarme
Talarm= 10 * Talarm/240 ; calibrage de 0 à 10 s
loop while recepA=0 ;boucle tant que tsop éclairé
pinsB=%11111 ;allumage les 5 leds
do loop while recepA=1 ;attente passage après barrière
setint %100,%100 ;interruption sur C.2 (barr départ) niveau haut
time=0 ;RAZ compteur de secondes (timer 1s)
do ;boucle selectcase
rest=tempo-time ;écart temporisation et temps attente
select case rest ;selection en ft valeur de rest
case 4
pinsB=%1111 ;4 leds allumées
case=3
pinsB=%111
case=2
pinsB=%11
case=1
pinsB=%1
case=0
pinsB=%0 ;tout éteint
exit ;case=0 => sortie de boucle
end select
loop
loop ;fin boucle principale
;*************************************
interrupt: ;interruption si barrière départ franchie
if time<tempo then ;Oh lala, il a grillé le feu!!!
time=0
do ;boucle alarme
high alarm ;alarme ON
pause 1000 ;=250ms à 16MHz
low alarm ;alarme off
pause 1000
loop while time<Talarm or pous=0 ;temps alarme
low alarm
do loop while pous=0 ;attente arret poussoir
endif
do loop while recepD=1 ;attente sortie barrière départ
reset ;RAZ du programme (soluce facile RAZ piles sub/return)
;******************************************
regtempo: ;réglage temporisations tempo et temps larme
do
test=recepD*2+recepA ;test des barrières: led allumée=défaut
pinsB=test ;visu test sur portique
loop while pous=0 ;attente relachement
pinsB=tempo ;visu tempo pénalité sur portique en binaite: %1010 = 8+2=10
do
time=0
do
if time>2 then ;sortie auto après 3 secondes sans appui
write 0,tempo ;mémo temps pénatité en EEPROOM
return ;retour boucle principale
endif
loop while pous=1 ;fin boucle attente sans appui
do loop while pous=0 ;boucle attente relachement
inc tempo ;comptage appuis poussoir
if tempo>15 then ;bouclage sur 15s
tempo=0
endif
pinsB=tempo ;visualisation tempo sur leds
loop