TÉLÉPHÉRIQUE
L'origine de cette page est la demande d'un forumeur sur un site d'électronique.
J'ai donc proposé ce projet: 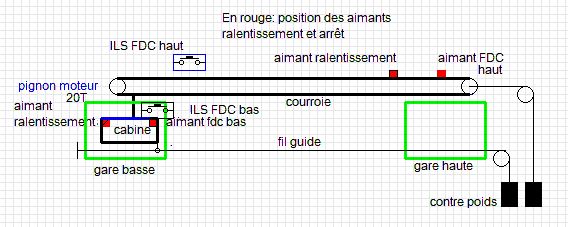
Description:
Une cabine d'environ 25 cm de long navigue alternativement d'une gare haute à une gare basse (présentées ici à l'horizontale).
Elle est accrochée à une courrroie dentée, type GT2 10mm de large, de 10m de long (2 x 5 m), destinée aux imprimantes 3D, elle tourne autour de deux pignons GT2 20T (20 dents). Le diamètre de l'axe moteur est de 4 mm
Le pignon du bas est entrainé par un motoréducteur JGA25-370 en 12V. Package au choix.
Calcul de la vitesse moteur:
La distance à parcourir est d'environ 450 cm, si on fixe le temps de parcours à 45 s, la vitesse sera de 10 cm par seconde.
Un tour de pignon GT2 de 20 dents fait avancer la courroie de 20 x 2 mm = 40 mm donc , 4 cm par tour.
Pour une vitesse de 10 cm/s, il faut une rotation de 10 /4 tours par s et donc 10/4 x 60 t/mn =150t/mn
La cabine est de construction légère et sensible au vent. Elle doit resté verticale, par gravité ou par deux liaisons de longueurs différentes fonction de la pente. On peut supprimer le balancement latéral par un fil guide, genre fil de pêche, passant dans une fente placée sous la cabine.
Les fin de courses sont deux interrupteurs ILS. Ils se ferment au passage de deux aimants, un pour le ralentissement, un autre pour l'arrêt complet.
Pour le bas, les aimants sont fixés sur la cabine, à l'avant et à l'arrière, à env. 25cm de distance l'un de l'autre. Le premier aimant provoque, au passage de l'ILS, le ralentissement de la cabine, passant en 25 cm (2 s) de 100% à 10% de sa vitesse, le second aimant provoque l'arrêt complet.
Modif du 23/09/25: le passage sur le premier aimant provoque le ralentissement jusqu'à l'arrêt complet 0%. reportée dans le code ci dessous.
La cabine repart dans l'autre après 10 s d'arrêt.
Les deux aimants, placés sur la courroie supérieure descendent vers la gare basse, un second ILS (FDC haut) provoquera les mêmes effets aux passages des aimants.
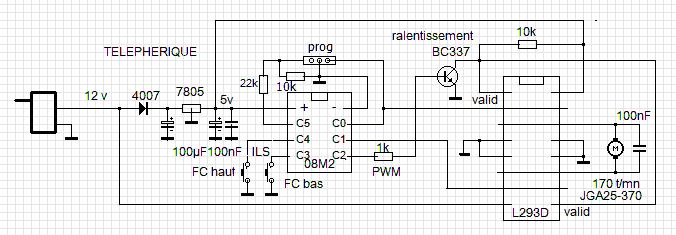
La gestion du moteur et des aimants est effectuée par un µC picaxe 08M2, suivant ce schéma:
Une cabine d'environ 25 cm de long navigue alternativement d'une gare haute à une gare basse (présentées ici à l'horizontale).
Elle est accrochée à une courrroie dentée, type GT2 10mm de large, de 10m de long (2 x 5 m), destinée aux imprimantes 3D, elle tourne autour de deux pignons GT2 20T (20 dents). Le diamètre de l'axe moteur est de 4 mm
Le pignon du bas est entrainé par un motoréducteur JGA25-370 en 12V. Package au choix.
Calcul de la vitesse moteur:
La distance à parcourir est d'environ 450 cm, si on fixe le temps de parcours à 45 s, la vitesse sera de 10 cm par seconde.
Un tour de pignon GT2 de 20 dents fait avancer la courroie de 20 x 2 mm = 40 mm donc , 4 cm par tour.
Pour une vitesse de 10 cm/s, il faut une rotation de 10 /4 tours par s et donc 10/4 x 60 t/mn =150t/mn
La cabine est de construction légère et sensible au vent. Elle doit resté verticale, par gravité ou par deux liaisons de longueurs différentes fonction de la pente. On peut supprimer le balancement latéral par un fil guide, genre fil de pêche, passant dans une fente placée sous la cabine.
Les fin de courses sont deux interrupteurs ILS. Ils se ferment au passage de deux aimants, un pour le ralentissement, un autre pour l'arrêt complet.
Pour le bas, les aimants sont fixés sur la cabine, à l'avant et à l'arrière, à env. 25cm de distance l'un de l'autre. Le premier aimant provoque, au passage de l'ILS, le ralentissement de la cabine, passant en 25 cm (2 s) de 100% à 10% de sa vitesse, le second aimant provoque l'arrêt complet.
Modif du 23/09/25: le passage sur le premier aimant provoque le ralentissement jusqu'à l'arrêt complet 0%. reportée dans le code ci dessous.
La cabine repart dans l'autre après 10 s d'arrêt.
Les deux aimants, placés sur la courroie supérieure descendent vers la gare basse, un second ILS (FDC haut) provoquera les mêmes effets aux passages des aimants.
La gestion du moteur et des aimants est effectuée par un µC picaxe 08M2, suivant ce schéma:
Le code:
;téléphérique MM 21/07/25
;Un ILS et DEUX aimants : R=ralentissement ;A=arrêt
#picaxe 08M2
#no_data
symbol FDCH= pinC.3
symbol FDCB= pinC.4 ; ____R______A____
symbol monte=C.0 ; ---<---<----<----<
symbol desc=C.1
symbol cpt=b1
pwmout C.2,100,200 ;initialisation :PWM 10kHz valid L293=1
;Situation à la mise sous tension *******************
if FDCH=0 then ;on est arreté gare haute
gosub descente ;on descent
elseif FDCB=0 then ;on est en gare basse
gosub montee ;on monte
else gosub montee ;on est entre les deux gares ; on monte
endif
do ;boucle principale
gosub descente
pause 10000 ;arrêt 10 secondes
gosub montee
pause 10000
loop
descente:
high desc ;moteur alimenté en descente
for cpt=0 to 200 ;accélération démarrage 100 pas de 20ms=>2s
pwmduty C.2,cpt ;cpt=200 => 100%
pause 20 ;pas variation vitesse 200 x 20 = 4000 = 4s
next
do loop while FDCB=1 ;ON jusq'au fin de course bas FDCB =0 => décélération
for cpt=200 to 0 ;aimant ralentisment ->arrêt complet modif 23/09/25
pwmduty C.2,cpt ;200=100% 20=10% moteur ralenti à 10 %
pause 11 ;180 x 11=1980
next ;le premier passage FDCB=0 à ralenti mais pas arreté le moteur
;do loop while FDCB=1 ;jusqu'à FC arret
low desc ;arret moteur sens descente
return
montee:
high monte
for cpt=0 to 200 ;accélération démarrage
pwmduty C.2,cpt
pause 20 ;200 x 20 =4000ms =4s
next
do loop while FDCH=1 ;attente passage aimant
for cpt=200 to 0 ;aimant ralentisment (modif 23/09/25)
pwmduty C.2,cpt ;200=100%
pause 11 ;180 x 11 =1980 ms
next
;do loop while FDCH=1 ;jusqu'à FC arret (modif 23/09/25)
low monte ;arret moteur sens descente
return
;Un ILS et DEUX aimants : R=ralentissement ;A=arrêt
#picaxe 08M2
#no_data
symbol FDCH= pinC.3
symbol FDCB= pinC.4 ; ____R______A____
symbol monte=C.0 ; ---<---<----<----<
symbol desc=C.1
symbol cpt=b1
pwmout C.2,100,200 ;initialisation :PWM 10kHz valid L293=1
;Situation à la mise sous tension *******************
if FDCH=0 then ;on est arreté gare haute
gosub descente ;on descent
elseif FDCB=0 then ;on est en gare basse
gosub montee ;on monte
else gosub montee ;on est entre les deux gares ; on monte
endif
do ;boucle principale
gosub descente
pause 10000 ;arrêt 10 secondes
gosub montee
pause 10000
loop
descente:
high desc ;moteur alimenté en descente
for cpt=0 to 200 ;accélération démarrage 100 pas de 20ms=>2s
pwmduty C.2,cpt ;cpt=200 => 100%
pause 20 ;pas variation vitesse 200 x 20 = 4000 = 4s
next
do loop while FDCB=1 ;ON jusq'au fin de course bas FDCB =0 => décélération
for cpt=200 to 0 ;aimant ralentisment ->arrêt complet modif 23/09/25
pwmduty C.2,cpt ;200=100% 20=10% moteur ralenti à 10 %
pause 11 ;180 x 11=1980
next ;le premier passage FDCB=0 à ralenti mais pas arreté le moteur
;do loop while FDCB=1 ;jusqu'à FC arret
low desc ;arret moteur sens descente
return
montee:
high monte
for cpt=0 to 200 ;accélération démarrage
pwmduty C.2,cpt
pause 20 ;200 x 20 =4000ms =4s
next
do loop while FDCH=1 ;attente passage aimant
for cpt=200 to 0 ;aimant ralentisment (modif 23/09/25)
pwmduty C.2,cpt ;200=100%
pause 11 ;180 x 11 =1980 ms
next
;do loop while FDCH=1 ;jusqu'à FC arret (modif 23/09/25)
low monte ;arret moteur sens descente
return