SONDE CAPACITIVE PICAXE 08M2
À LIAISON SÉRIE
Plusieurs types de sondes sont utilisés pour mesurer le niveau des liquides:Les sondes à flotteurs, tout ou rien ou analogiques avec leurs problèmes mécaniques.
Les sondes résistives, mesure la conductibilité de l'eau qui dépend des ions dissous, elle est donc variable, de plus, le courant provoque une électrolyse qui peut corroder les électrodes.
Les sondes capacitives entièrement statiques et ne générant aucun courant ont quelques avantages. Sans courant, la conductivité de l'eau n'est plus un facteur important, une faible conductivité suffit.
La capacité variable ne dépend que des caractéristiques du fil utilisé: diamètre du cuivre, constantes diélectriques et épaisseur de l'isolant.
Ce qui suit est une évolution de l'essai mené sur cette page, utilisant la commande TOUCH des picaxes. Le but est de fiabiliser cette possibilité et de l'utiliser dans une application de lecture et de régulation de niveau de liquide.
DESCRIPTION:
- La sonde émettrice
Le récipient n'est pas conducteur, il faut une tige métallique de la hauteur du liquide reliée au potentiel 0v pour annuler les effets parasites (mains etc).
Un unique picaxe 08M2 avec ses condensateurs de découplage assure la liaison RS232, aucun problème avec 15 m de cordon téléphonique 4 conducteurs standard, avec ou sans connecteurs RJ11.
- Le récepteur
Visualisation du niveau lu et le réglage de l'alarme sur un LCD1602 série (acheté tout fait ou fabriqué "maison"), un potentiomètre (10k) pour régler le niveau d'alarme et un poussoir pour calibrer la mesure.
L'alarme bas niveau est signalée par l'alumage d'une led. En ajoutant en série un relais statique, on peut commander n'importe quoi.
- L'alimentation
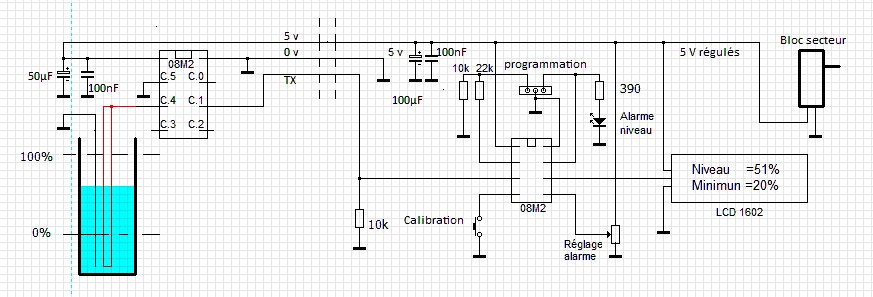
SCHÉMA DE L'ÉLECTRONIQUE:
Petite vidéo de démo, cliquez sur la vidéo pour agrandir:
Ce qui n'est pas sur la vidéo:
| La tête de sonde: Un picaxe avec ses deux condensateurs de découplage et c'est tout. La barre métallique est une récup de tringle à rideaux, avec une gaine thermorétractable | 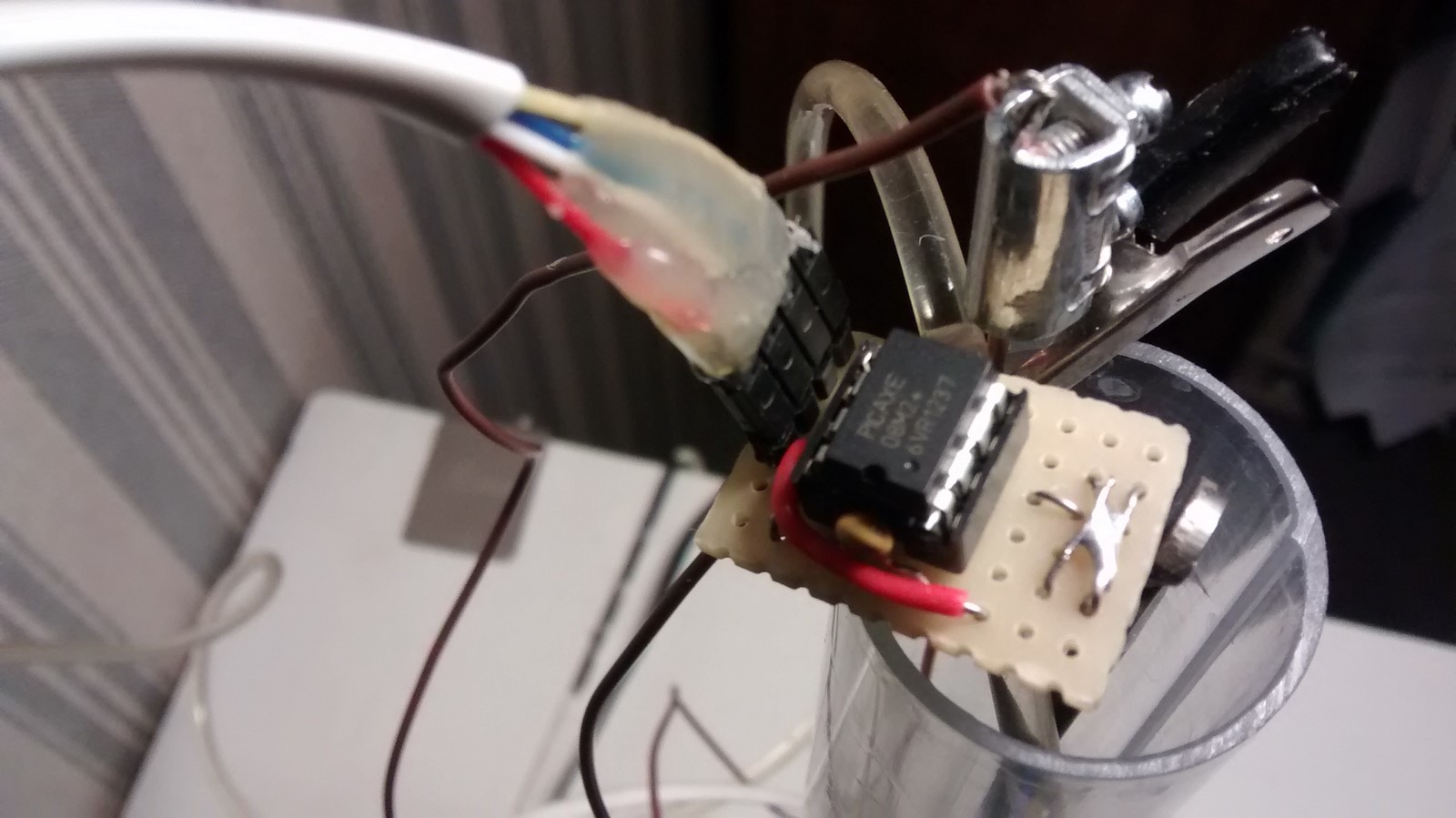 |
| Le montage complet sur une platine d'essais. Avec le tube en plastique et le bocal faisant vases communicants |  |
C'est finalement le plus simple.
Résumé: la variable retournée par touch16 est une variable de type word, c'est à dire sur 2 octets. La variable w13 étant la concaténation des variables de type byte (un octet) (b27;b26), la décomposition en deux octets est implicite.
On lit w13 avec touch16, et on envoie (b27;b26) par serout, soit 2 lignes en boucle avec une petite pause.
L'octet de configuration entre crochets est modifié, la sensibilité est divisée par 4 par rapport à la configuration de base, voir les déails sur cette page.
;EMETTEUR SERIE pour sonde capacitive MM 13/09/15
#picaxe 08M2 ;directive picaxe utilisé
;***** Nominations des variables***********
symbol baud= N4800_4
;**** Nomination des ports
symbol sonde = C.4 ;port commande touch
symbol portS = C.1 ;port liaison série
;****** Boucle de mesure et liaison série ***********
;serout portS,baud,(254,1) 'RAZ afficheur
Do
touch16 [%11001001],sonde,w13 ;w13 (type word est composé des deux bytes (b27;b26)
serout portS,baud,(b27,b26) ;Envoi des deux octets de w13 par serout
pause 200 ;Faut pas aller trop vite
loop
LE CODE RÉCEPTEUR:
Il est quasiment identique à celui du test.
(Rappel: les textes après les ; sont des commentaires)
;Ex: Sonde de niveau capacitive MM 13/09/2015
;**** calibration de la sonde à la mise sous tension. ***************
;**** La réponse de la comande TOUCH est considérée comme linéaire
;**** La droite est de la forme pct(%) = pente x mesur - Y0 *****
;**** Le sous programme "calib:" mesure deux points arbitraires 0 et 100% *********
;**** Calcule les paramètres pente et Y0 et les met en mémoire ****
;**** Affiche les étapes successives **************
#picaxe 08M2
;****** Nominations variables ********
symbol baud= N4800
;****** variables word *********
symbol pente = w12
symbol mesur = w13
symbol var2 = w11
symbol var1 = w10
symbol Y0 = w9
symbol seuil = w8
symbol seuilh = w7
;******* Nominations ports ***********
symbol valid = pinC.3 ;poussoir de validation
symbol LED = C.0
symbol POTAR = C.4
symbol LCD = C.1
symbol SONDE = C.2
;******* Début Programme principal *****************
pause 200 ' initiation LCD
pullup %01000 ;pullup sur C.3
read 0,word pente, word Y0 ; lecture des paramètres de la droite enregistrée
if pente =0 or valid=0 then gosub calib ; Vers calib: si paramètre nul ou nouvelle calibration
Do 'BOUCLE PRINCIPALE
gosub mesure
gosub calcul
gosub affich
gosub AlarmSeuil
loop
;******* Fin programme principal *****************
;******* Les sous programmes: ***********************
;************** Mesure de la sonde, liaison RS232 ***************
mesure:
serin [2000,AlarmSonde],SONDE,baud,b27,b26 ;time out 2 secondes
;mesur=w13 = (b27;b26) ;reconstitution de la mesure brute
if mesur =0 then gosub alarmsonde ;erreur de mesure
mesur=mesur/100 ;on garde les chiffres significatifs
return
'******** Affichage des valeurs lues ***********
affich:
bintoascii mesur,b1,b2,b3,b4,b5 ;décomposition ascii
serout LCD,baud,(254,128,"niveau = ",b3,b4,b5, "%") ;envoi LCD série
bintoascii seuil,b1,b2,b3,b4,b5
serout LCD,baud,(254,192,"Minimum = ",b3,b4,b5, "%") ;envoi LCD série
return
;******* Calibration, Calcul paramètres, Affichage, Mise en mémoires ***
calib:
do:loop while valid=0 ;attente relachement poussoir
serout LCD,baud,(254,1) ;effacement écran
serout LCD,baud,(254,128, "calibration 0 %") ;titre
do
gosub mesure
var1=mesur ;mesure du point 0%
bintoascii mesur,b1,b2,b3,b4,b5 ;affichage
serout LCD,baud,(254,192,"mesure 0% =",b3,b4,b5) ;pour voir
loop while valid=1 ;attente validation
serout LCD,baud,(254,128,"calibration 100%") ;titre
do:loop while valid=0 ;attente relachement poussoir
do
gosub mesure
var2=mesur ;mesure du point 100%
bintoascii mesur,b1,b2,b3,b4,b5
serout LCD,baud,(254,192,"mesure 100%=",b3,b4,b5)
loop while valid=1
if var1>var2 then calib ;erreur de procédure. retour début
var2=var2-var1 ;différence des mesures (déja /100)
pente= 10000/var2 ;delta % (=100 par def) x 100; / par var mesure /100 d'ou pente x 10000
Y0 = var1 * pente ;ordonnée origine d'ou,( % *100 = mesure/100 * pente - Y0 )
do:loop while valid=0
write 0,word pente,word Y0 ;Mise en mémoire EEPROM
serout LCD,baud,(254,1) ;Effacement écran
serout LCD,baud,(254,128, "calibration ") ;affichage
serout LCD,baud,(254,192, "effectu",1,"e ") ;1 est le é en CGRAM du LCD maison
pause 1000 ;Temps d'affichage 1 seconde
serout LCD,baud,(254,1)
return
;*********** Calcul pourcentage ***********************
calcul:
mesur=mesur * pente ;un bout de l'équation
if Y0>mesur then ;pour éviter de passer du côté obscur
mesur=0 ;blocage à 0
else mesur=mesur-Y0 ;calcul poucentage (en centièmes de pourcents)
endif
mesur=mesur/100 ;unités de pourcentage
return
;***** Alarmes dépassement Time Out liaison sonde (temporaire) et défaut sonde **********
AlarmSonde:
if mesur=0 then
serout LCD,baud,(254,128,"DEFAUT SONDE 000")
else
serout LCD,baud,(254,128," DEFAUT TIMEOUT ")
endif
pause 2000
serout LCD,baud,(254,1) ;effacement message
return
'******** Programme 1 en Temps partagé: Signalisation **************
AlarmSeuil:
readadc POTAR,seuil ;lecture potentiomètre ;max vers 255%
if mesur<seuil then ;comparaison
high led ;allumage led
endif
seuilh=seuil+2 ;hystérésis 2%
if mesur>seuilh then
low led ;extinction led
endif
return